Modern production environments demand seamless integration between physical robotics, micro-millimeter motor controllers, and real-time closed-loop mechatronics systems. Baron MentorX engineers robust hardware-level control topologies.
From high-speed collaborative robotics (cobots) executing micro-assembly operations to autonomous guided vehicles (AGVs) navigating heavy-load logistics lanes, we mathematically optimize multi-axis toolpaths, minimize torque ripple/vibrational oscillations, and integrate zero-latency hardware safety zones to ensure safe, continuous factory throughput.

Deploying robotic hardware into live industrial zones requires a rigorous, multi-tiered engineering and simulation methodology.
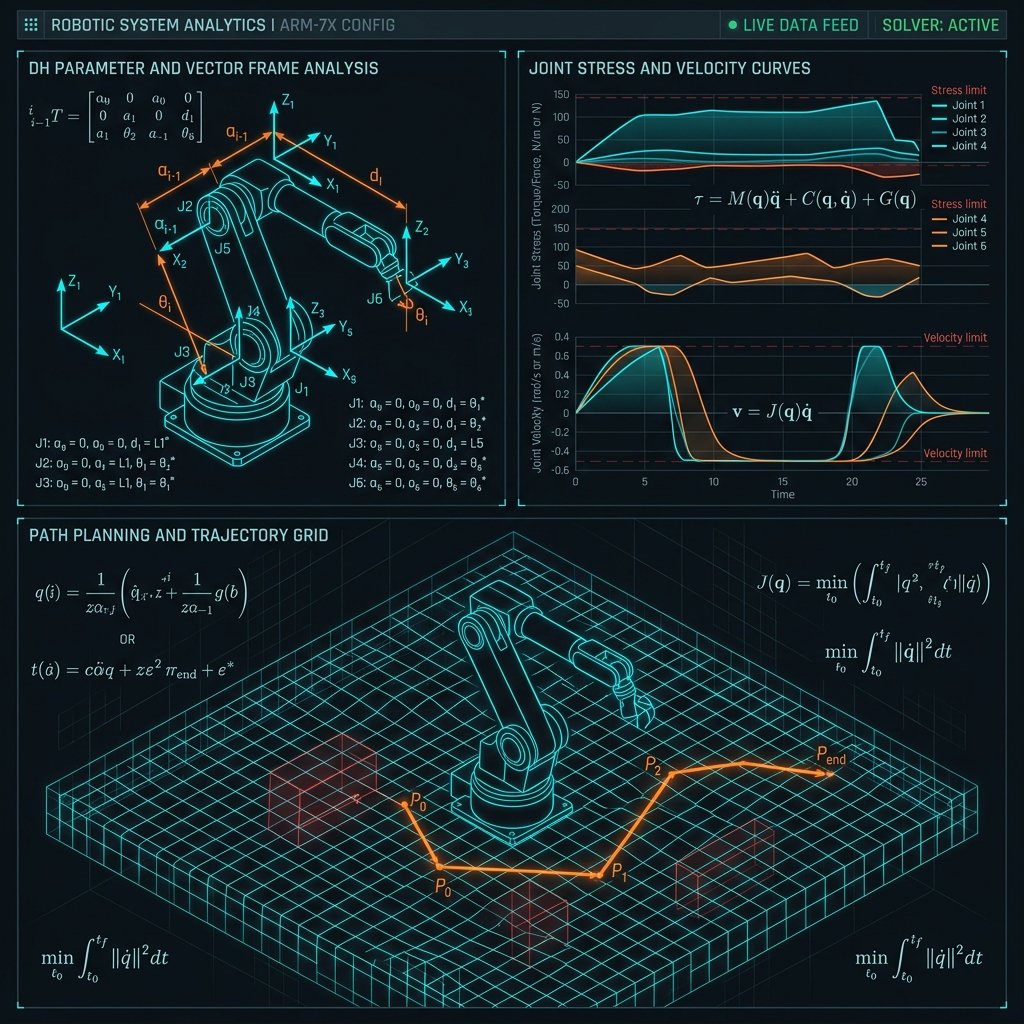
Synthesizing Denavit-Hartenberg (DH) parameter models to map multi-joint workspace reaches, verify workspace clearance, and minimize mechanical joint stress.
Diagnosing encoder feedback lag and adjusting PID gains to eliminate high-frequency oscillations and prevent motor control thermal wear.
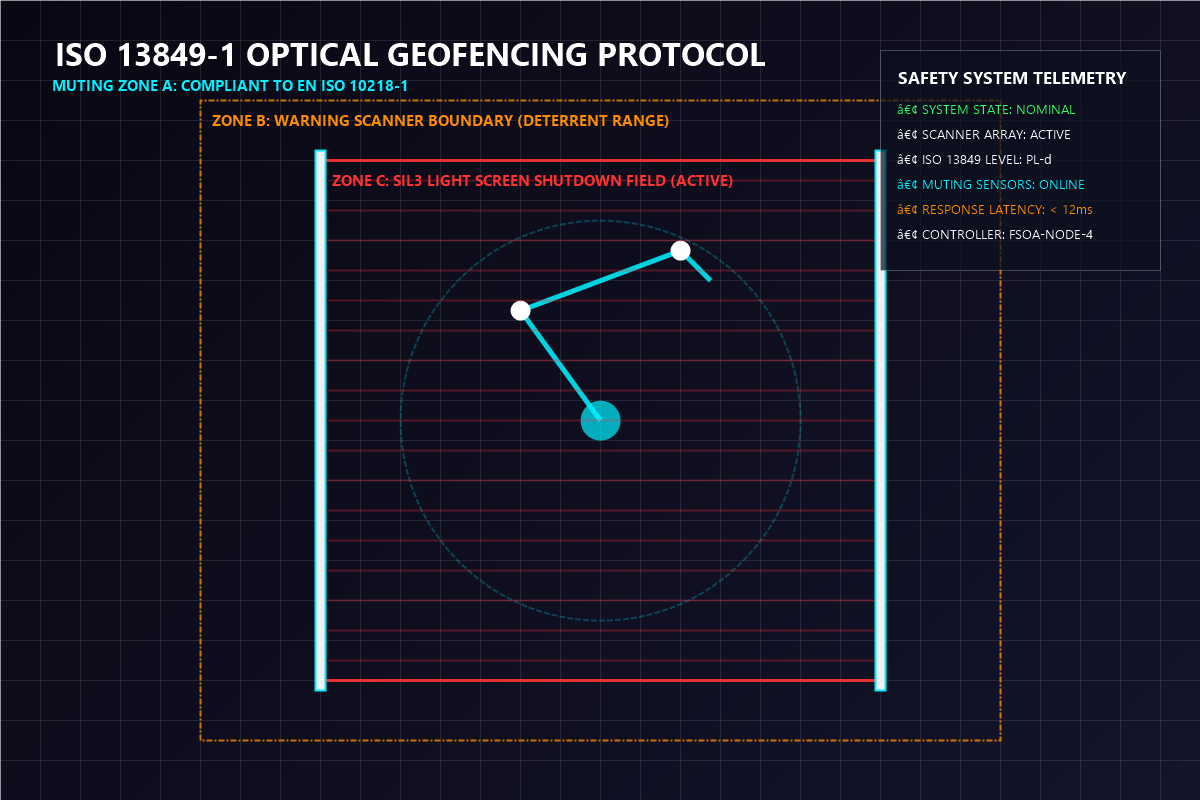
Implementing dual-channel safety relays, safety scanners, and physical light screens to enforce strict ISO 13849 and ISO 10218 compliance boundaries.
Configuring fieldbus networks to sync robotic controllers with industrial PLCs, feeding real-time joint and productivity telemetry back to ERP databases.
We build high-performance robotics pipelines to automate assembly cells, control traffic patterns, and diagnose systems before failure.
Designing customized inverse kinematics modules optimized for joints speed, stress minimization, and mechanical collision avoidance.
Setting up geofencing safety scanners and laser light screens that trigger speed reductions when human operators enter boundaries.
Synchronizing high-speed Fieldbus nodes to match motor feedback loops under microsecond limits for multi-device assembly lines.
Designing warehouse floor traffic logic, dynamic path allocation, and wireless collision avoidance for autonomous mobile robots.
Deploying continuous acoustic and vibration monitoring arrays to flag mechanical gear, joint, or motor bearing wear before failure occurs.
Emulating robotic operations in high-fidelity 3D CAD environments to verify trajectory controls and collision states before deploying firmware code.
Safe human-robot collaboration requires failsafe sensor networks and audited control circuits. We design functional safety to international standards.
Our safety engineers design complete safety system architectures that achieve ISO 13849-1 Performance Level d/e (PL-d/PL-e) and EN ISO 10218 compliance. We model the placement of laser safety scanners, muting sensors, and virtual light curtain zones to map out appropriate deceleration zones and emergency stop distances.
By integrating Failsafe-over-EtherCAT (FSoE) and PROFIsafe communication networks directly into the PLC master bus, we guarantee that any sensor interruption immediately halts workcell actuator motors in under 12 milliseconds, protecting your staff while avoiding unnecessary plant-wide shutdowns.
Speak with our mechatronics and control system engineers to plan, design, or audit your factory floor robotics setups.
Connect with Automation Engineers